Glossary
AC drive—An Alternating Current drive is typically synonymous with Variable Frequency Drive (VFD).
Architecture—How the various components in a packaging machine control system (or on a packaging line) are connected, both conceptually and physically.
Axis of motion—A single drive/motor combination in a packaging machine. Each axis of motion can consist of a separate (though related) movement, as in unwind reels or infeed conveyor, or can be combined for a tightly coordinated movement, as on a robot.
Bus—Typically used synonymously with network or protocol.
Connectivity—Refers to the ability of a control or component to connect to a network of some type, whether it's a fieldbus, motion network or peer-to-peer network.
Deterministic scan time—The repeatable, nonvarying interval of time in which a PLC executes a program, including scanning all the inputs and outputs on a packaging machine. Usually measured in milliseconds. A PLC might read a machine's sensors, make any necessary logic decisions and output signals to components on a packaging machine every 300 milliseconds.
Digital signal—One that communicates information in electrical pulses that represent binary 1s and 0s.
Drive—A type of electronic control device that translates a given motion command from a controller (whether a PLC, PC or motion controller) into the electrical power that turns a motor. Sometimes referred to as an amplifier, because it in effect “amplifies” a digital signal into the raw electrical power required to turn the motor.
Encoder—A device built into a servo motor that provides feedback to the drive on the motor's exact position. Circuitry in the encoder provides output as a digital signal. Another type of feedback device is known as a resolver.
Ethernet—An open standard, Ethernet is a network protocol that's become the defacto standard for peer-to-peer and plant networks.
Fieldbus—A category of network, typically contained within a packaging machine, that links sensors, actuators and other components to a controller (either a PLC or PC). Eliminates point-to-point wiring between the controller and each device. In packaging, typically used interchangeably with the term “device-level network.” Fieldbuses are also common for linking together sensors used in lengthy conveyor networks such as those found in warehouse distribution environments.
Hard, real-time control—Refers to the ability of a controller to respond to an event immediately, without delay. Hard-wired discrete devices (including some PLC modules) used to be the only hard, real-time controls available. For a PC to be considered a hard, real-time controller, its software must be considered the highest priority task and made independent of the rest of the PC.
Human-Machine Interface (HMI)—The hardware or software through which an operator or mechanic interacts with the controller of a packaging machine or line. An HMI, sometimes referred to as MMI (man-machine interface) or OI (operator interface), can range from a physical control panel with buttons and indicator lights to an industrial PC with a color graphics display running dedicated HMI software.
I/O—Refers to the Input/Output of communications between a PLC and a packaging machine's sensors, actuators and other devices. Input/Output signals can traverse a fieldbus or point-to-point wiring.
Ladder logic—A type of programming language widely used for PLCs. Consists of a symbol system that is meant to simulate the circuits of electrical relays (used in the previous generation of machine control). PLCs that conform to the standards promoted by PLCopen can also be programmed via several other methods.
Motion controller—An electronic control inside a packaging machine that communicates position, torque, acceleration, velocity, position and speed information to one or more drives. For motion-intensive packaging machine applications, a dedicated motion controller is often required in addition to a PLC and drives.
Motion network—A category of network, typically contained within a packaging machine, that uses a single cable to connect all the drives in the machine to a controller, whether a PC, PLC or motion controller. The alternative is to wire each drive to the controller separately through point-to-point wiring.
Network—A way of wiring separate, individual devices or machines together so that one machine can communicate with any other machine via a common communications cable. For example, several packaging machine controllers (PLCs or PCs) can communicate over a peer-to-peer network. Conversely, one controller can communicate with several sensors and actuators in a fieldbus network inside a packaging machine. A network eliminates the need for point-to-point wiring but introduces the potential for delay due to communications traffic jams. However, for many packaging applications, many of today's modern networks are fast enough to mitigate speed concerns. Often used interchangeably with protocol or network protocol.
Open standard—A standard type of hardware, software, language or communications protocol that's widely adopted by many suppliers and not owned by any individual supplier.
Operator interface—Often used interchangeably with Human-Machine Interface (HMI), though some think of the operator interface as the physical hardware and the HMI as the software or functionality contained within.
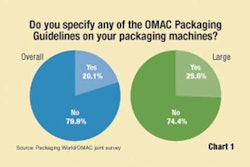
OMAC—Open Modular Architecture Controls is a users group that started in the auto industry but has since expanded to capital equipment users in several industries, including food and pharmaceutical. Packaging machinery end-users formed an OMAC working group in early 2000 to address the lack of standards specifically for packaging machine control.
PC—Refers to Personal Computer. PC hardware and software can be adapted for packaging machine control. However, there is currently no dominant operating system software or control software for PCs the way there is for PLCs. The lack of critical mass around a common PC control standard has caused many machinery builders and end-users to hesitate using PC controls.
Peer-to-peer network—A category of network that connects several packaging machines. Very different from a fieldbus or motion network, which are contained within a machine (see diagrams above).
PLC—Programmable Logic Controller is actually a type of specialized computer that provides hard, real-time control of packaging and other equipment thanks to fast, repeatable deterministic scan times.
PLCopen—A trade group of controls suppliers dedicated to the promotion of the IEC 61131-3 standard for programming industrial controllers, whether PLCs or PCs. The standard is designed to reduce or eliminate the different versions of ladder logic programming languages that exist among different brands of controllers. The standard consists of five standardized methods or languages for programming a controller.
PLS—A Programmable Limit Switch converts the rotary motion of a shaft into digital signals. PLSs are typically used to increase the accuracy of material or product positioning or registration. Often used in conjunction with PLCs.
Point-to-point wiring—The traditional method of wiring each component on a packaging machine directly to a controller, vs. putting each component on a common network cable, which enables shared communications without extensive engineering or installation time.
Protocol—A particular method of encoding information for transmission over a network cable. Often used interchangeably with network or standard.
Resolver—A feedback device built into a servo motor that provides feedback on the motor's exact position to the drive that powers it. Resolvers provide feedback via an analog signal. Unlike encoders, there is no circuitry inside resolvers, so they tend to better withstand applications with extensive shock and vibration.
SCADA—Supervisory Control And Data Acquisition refers to software and hardware that (1) permits the control of an entire packaging line and (2) automatically collects data on that line's efficiency. SCADA software typically runs on a PC server that's connected to a peer-to-peer network on a packaging line.
SERCOS—SErial Real-time COmmunications Standard. An open standard (IEC 1491) designed especially for motion networks. Defines a method for transmitting digital information over a fiber-optic cable.
Servo drive—A type of drive that works specifically with servo motors. Transmits commands to the motor and receives feedback from the servo motor's resolver or encoder on the motor's exact position. Based on positioning and time elapsed, the servo drive then calculates the motor's actual speed. Multiple servo drives can be synchronized electronically by a motion controller, often across a motion network, instead of relying on physical line shafts and linkages.
Servo motor—A motor that together with its resolver or encoder is capable of being much more precisely controlled than nonservo motors. That's because it provides constant and highly accurate feedback on the motor's exact position to the drive that powers it.
Variable Frequency Drive (VFD)—A type of drive that controls the speed—but not the precise position—of a nonservo, AC motor by varying the frequency of the electricity going to that motor. Unlike a servo drive/motor combination, there is no feedback from an AC motor to a VFD. In packaging, VFDs are typically used for applications where speed and power are important, but precise positioning isn't. Often used synonymously with AC drive.