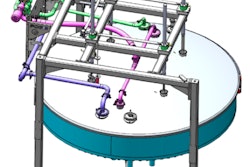
Vials are manually fed to the MB25 via a gravity chute, and caps are manually fed via an infeed conveyor. Both vials and caps may be automatically delivered to the system with optional feeders. Vials first index to the filling station, which dispenses a precise amount of liquid in the vial. After the filling process, vials index to a two-stage, servo-driven capping system that picks and places a cap and applies a slight amount of pre-torque to seat it. The starwheel then indexes the vial to the final torque station where a pre-programmed amount of torque is applied.
The MB25 employs No Bottle-No Fill-No Cap sensors to prevent filling in the case of a missed vial and allow for automatic reject of non-compliant vials.
At the machine discharge, a TaskMate robotic system with FANUC M-1iA robot and ESS-designed end-of-arm tooling will pick capped vials and place them onto a discharge conveyor. For systems that include an automatic reject, the robot can also be programmed to place noncompliant vials into a separate bin from the compliant product. The system includes an Allen Bradley PLC and color, touchscreen HMI for simple and reliable operation. The complete system occupies only 7 ft. x 11 ft. of space, creating a compact and cost-effective automated solution.