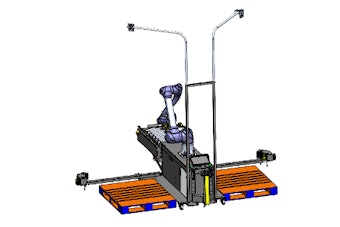
Baxter Healthcare’s Medication Delivery plant in Aibonito, Puerto Rico, features a case-packing operation anchored by a robot. The robot fills the cases with blister packs that it picks up using a custom, hinged gripper with vacuum cups. The cases are erected and, after filling by the robot, are sealed on the same integrated system.
The UP6 robot with XRC controller and Flexview® 1000 touchscreen panel interface is supplied by Motoman (West Carrollton, OH). The case-erecting and sealing portions comprise an Ergopack® system with automatic case erector, sealer, and controls from Combi Packaging Systems LLC (Canton, OH). The robotic packer replaces a hand-pack station in the Ergopack layout. It also includes a powered belt-type, case infeed conveyor with side-grip rails, and top and bottom case sealer.
Other components include slipsheet stand, 8’-long powered infeed conveyor, and 4’-long powered belt conveyor that spaces the product for the robot. The preassembly and integration of the equipment was done by Motoman.
Baxter engineering director Manuel Garcia reports that the main benefit of this setup is the labor savings from not having two to four operators manually forming cases and loading them with the packs.
The boxes are packed in three different configurations: 12-, 20-, and 48-count sizes. The robot cycles in about five seconds, Garcia relates. The packing time per case ranges from one or two minutes for the small sizes to three to four minutes for the 48-count size.
Although that’s hardly a blistering pace, the robot’s real value is in its accuracy. “We avoid complaints of over- and under-count cases,” says Garcia. The robot normally operates for two eight-hour shifts five days a week.
Operating sequence
An operator manually loads knocked-down cases into the supply magazine of the erector, which uses suction cups to pull the case open. Mechanical arms and plow rails automatically fold major and minor flaps to form the bottom of the case. Cases travel to the robotic cell via a powered belt conveyor with side-grip rails.
Meanwhile, four blister-packed products are placed onto the infeed conveyor by hand, lid-side up and lengthwise in the conveyor direction. Garcia says this manual step permits personnel to visually inspect the packs as they place them onto the conveyor. Containing an intravenous medical set, the 15¼”x37/8” packs are thermoformed of low-density polyethylene and sealed with one of two types of flexible lid stock. The four packs are conveyed side-by-side on the 8’-long product infeed belt conveyor. Before they reach the robot, they transfer to a 4’-long product conveyor running at a faster speed to space the packs into a pick-up position for the robot. Photoeye sensors trigger when parts are available for robotic pickup.
The UP6 robot picks the packs four at a time from the conveyor using a hinged end gripper. The hinge allows it to fold to accommodate small-case packing configurations. Each of the gripper’s two sections or zones has four vacuum cups with which to pick up the packs by affixing to the lid stock on the flat back of the blister. The gripper includes part-presence sensors and sensors to indicate gripper, pivot, and folded positions.
The packs are placed in layers of six each in 24- and 48-count cases. For the first loading, all four are released. Next, two packs are picked up and released to complete the layer. The robot starts the next layer with two packs, followed by four to complete the layer.
For 12-count boxes, the blisters are also picked four at a time, but are released two at a time; the case is packed six layers high of two blisters each. The gripper is hinged at 90º to facilitate placement of the blisters into the smaller case.
Additionally, for the large 48-count box, a corrugated slipsheet picked from an adjacent supply stand is added horizontally after 24 packs have been placed.
The Combi sealer automatically closes the top minor and major flaps and tapes the top and bottom as the box exits the machine onto a short gravity-flow roller conveyor. Palletized cases are then sterilized.
Although the robot is modular and wheeled for mobility, Garcia says they haven’t had to move it since the cell was started up in March 2000. —RL